
MAY THE FORECES BE WITH YOU
Math in Mechanics – Class 11 – Main Lesson
A study of the difference between force and movement was employed to open the lesson – this 2-fold theme was carried right through with emphasis being placed on umber as it applies to structure principles in mechanics even extending to the human limb system. Movement was studied in reference to statics and dynamics – this was explored even further through kinematics and with even greater emphasis on kinetics. The tree areas of mechanics – microscopic, applied and quantum were looked at as were the 2 kinds of quantities, fundamental and derived. The system used throughout the unit was the M.K.S. although the C.G. S. was mentions – introduced also were the concepts underlying the Newton; gravitational accelerations; mass and weight; the dyne and the principle of acceleration M.P.S.P.S.
The three factors of motion were taught; displacement, velocity and acceleration – these were used to construct displacement diagrams and vector diagrams and to find lines of concurrent quantities, taking care to retain consistency in magnitude and direction. Velocity was introduced in relation to acceleration and speed and the 4 equations of straight-line motion were given, including exercises. A series of statistical charts were drawn demonstrating displacement, velocity, acceleration and time.
The radian was described in the section on angular motion and displacement with calculations being done on revs and (traditionally) with
The six aspects with their symbols in both Greek and English alphabets were detailed: linear velocity u; linear displacement x; linear acceleration a; angular velocity ; angular displacement ; angular acceleration . The 4 equations for angular motion were also given. Wide practice in problem-solving was given here with combinations of various equations like Centripetal acceleration was also described and practiced with equations ; .
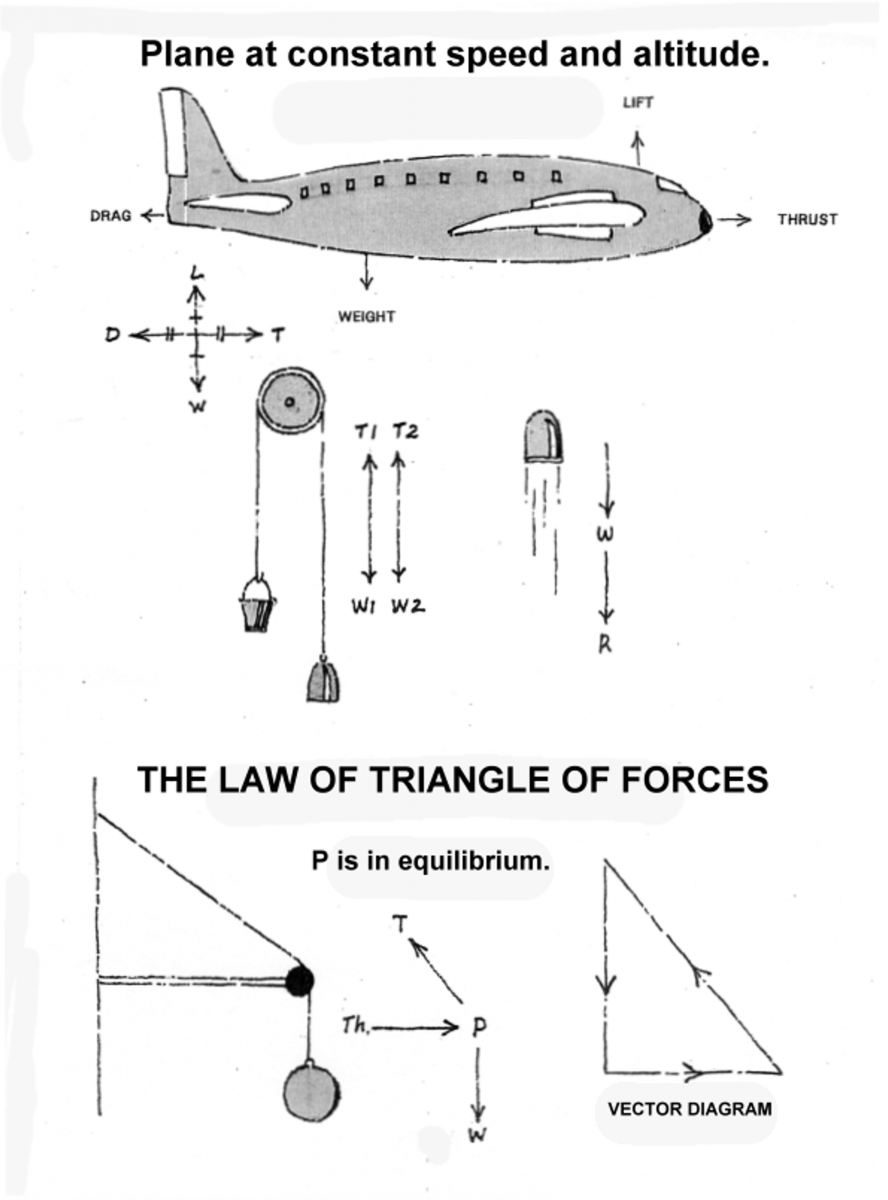
The second broad area of study, force, was introduced with a description of the push/pull – compression/tension aspects including its 3-fold nature of direct, remote and induced forces. The free body diagram was taught using a range of examples with the inclusion of the Law of Triangle of Forces.
With the resolution of forces using a right-angle triangle construction, a section on trigonometry was introduced – here practice was given on the 3 trig. Systems of natural tangents, natural cosines and natural sines using both tables and scientific calculators.
The concluding unit was devoted to the turning effect of a force – or its moment. The equation of Moment = Force X Perpendicular Distance was widely used on examples where turning actually occurred like a boat, or where a static condition prevailed like a bridge. In calculating a variety of moments the effect of clockwise or anticlockwise movement was shown. It was described how a right-angle triangle could be constructed to create the perpendicular so that moments could be calculated – in this case using trigonometry. Brief mention was made at the end of the lesson on ‘center of gravity’ and ‘torque’. The unit concluded with a test on work studied.
The forgoing is the unit Report on the Maths in Mechanics main lesson I taught my own Class 11. The following is an elaboration of some of the content: Classical Mechanics is the science that deals with the motions of material bodies moving at speeds that are small compared with the speed of light – unlike Quantum Mechanics, which describes the behavior of atoms and their ilk. Classical also differs from Relativistic Mechanics, which also deals with high speed phenomena.
Classical (‘Newtonian’) mechanics is a crucial element in physics, astronomy and most branches of engineering; being the foundation of all conventional structural and mechanical design. It is also of concern to pure mathematicians due to, for example, differential calculus (see later in this book) having had to be invented to solve mechanical problems.
The bodies dealt with in classical mechanics are assumed to be so inflexible that their deformations have no effect on their motions. These are treated in the Mechanics of Elasticity; while Fluid Mechanics deals with liquids and gases. Classical Mechanics is actually the oldest of the physical sciences; growing out of man’s quest for explanations to natural phenomena – of the rest-and-motion variety at least. This led to the desire to create more effective tools and machines.
The foundations of this ‘rest’ aspect, or Statics, were established by Archimedes in 3rd Century Greece. He devised formulas for the equilibrium of levers and centers of gravity. These derivations were restricted to parallel forces, which were marginally more difficult to deal with than collinear (sharing a common line) forces. In any case, the force was with him! The problem of non-parallel forces was not solved until the 16thCentury Dutch mathematician, Simon Stevin, conceived force as a vector (L. ‘to convey’) quality, having both magnitude and directions, and described by a directed line segment (arrow) – see later. Stevin solved the lever problem with non-parallel forces, and by observation and intuition alone (Steiner would call it an incipient ‘imaginative cognition’), demonstrated the equilibrium of bodies on a double inclined plane.
Stevin showed how to add force vectors by constructing a parallelogram using the force vectors as the sides. He claimed that what a simple machine gains in force, it loses in distance. Hence he comprehended the principle of ‘virtual work’ (like that performed by some schoolteachers on an off day!). This was only formalized later by Bernoulli 200 years later. Stevin provided an impetus to the study of Statics These previously had only the theory of the lever as a working principle.
Galileo, early in the 17th Century, laid the foundation for the science of Dynamics. He achieved this cognitive breakthrough by a scientifically consummate combination of analytical and experimental procedures. One of his vital contributions to Mechanics deals, as everyone knows, with the motion of falling bodies. My favorite Galileo riddle as a child was:
“If you dropped a pound of feathers and a pound of lead from a high building, which one would nit the head of the unsuspecting Bishop of Pisa below first?” Both at the same time of course! Galileo disproved the Aristotelian theory that heavy bodies fall faster than light ones. To verify that the height fallen was proportional to the square of the time, and independent of the weight, he rolled a ball down an inclined plane, measuring time of motion by weighing the water that flowed through a small hole at the bottom of a large tank.
Galileo developed the equation of the motion of a projectile, and showed that, neglecting air resistance, the curved path was the result of two independent motions; a horizonal motion at a constant speed, and a vertical motion at a varying speed under the action of gravity.
He utilized Stevin’s principle of compounding motions in accordance with the parallelogram law of force vectors. The great man even anticipated the Law of Inertia, formulated later by Newton, when he stated that a body in motion, and free from external influences, would continue moving at a constant speed in a straight line. He was the first to recognize that it was acceleration (rate of change of velocity) and neither velocity nor change of position that was determined by the external forces.
Following Galileo in the 17th Century, the next generous benefactor to the science of dynamics was the Dutch physicist, Christiaan Huygens. He developed the equations of motion of the pendulum, and invented the pendulum clock. The acceleration of gravity by pendulum was first observed by him, as was the ‘moment of inertia’ – the measure of the inertia of a boy in rotation.
In the true spirit of economy-in-karma, Isaac Newton was born the year Galileo died, and as well as his other stupendous mathematical and physics lightning bolts, he introduced the concepts of force and mass, and formulated the three Laws of Motion. Newton’s Second Law equates the force acting on a body to the product of the mass of the body and the acceleration. Because the latter is the time rate of change of velocity, the resulting equations of motion are differential equations. For clarity, whenever possible Newton employed geometric methods.
The Swiss 18th Century mathematician, Leonard Euler, wrote a series of textbooks on Mechanics. In these he used the analytical methods of calculus to solve the differential equations of motion. He also showed that any motion of a rigid body can be separated into a translation followed by a rotation about a chosen point. He also extended Newton’s Second Law, which applies to bodies with mass but negligible dimensions(particles), to rigid bodies.
The French mathematician, Jean Le Rond d’Alembert, was the author, in the same century, of a famous textbook on Mechanics, and the discovery of a principle that bears his name. This was an original method of solving problems in dynamics by applying the principles of Statics. When a body is accelerating, the forces acting on it are unbalanced, but by Newton’s Second Law, they are equal to the product of the mass and the acceleration of the body. By reversing the mass-acceleration terms, the body is placed in equilibrium. Unknown forces can be determined by the equations that apply to bodies at rest.
In my Maths in Mechanics Class 11 main lesson, I employed a 3-fold approach. The first was the structure; or numerical laws in Mechanics; second the manifestation of this structure in material form; third (on the advice of Steiner to involve man), to explore how these express in the human form. The two Pillars of Hercules of Mechanics are Statics and Dynamics – form and movement; or on a divine level, the deeds of the Exusiai, Spirits of Form, and the Dynamis, Spirits of Motion!
Statics are the Laws of Stillness, for example in building construction, or even a body in flight at a constant direction and velocity, Dynamics are, of course, bodies in movement, the turbulence surrounding the aforesaid body in flight for instance. Newtonian laws only apply to earthly dimensions; Quantum Mechanics rather to outer space and the atomic world. Dynamics is divided into Kinematics, the study of motion, and Kinetics, the study of motion in relation to the forces causing it.
The MKS System – based on the meter, kilogram and second as the units of length, mass and time – defines the three aspects of measurement in Mechanics. Derived quantities are combinations like KPH (or meters per second). The mass of an object is the same anywhere, even in non-gravitational situations; the weight of an object is mass X g force.
The g force is the gravitational acceleration; which is 9.81 meters per second per second. The weight of 1 kilogram is 9.81 units of force which equals 1 Newton. A Newton is the force required to move 1 kilogram 1 meter per second per second. A dyne (from ‘dynamic’) is the force required to move 1 gram 1 centimeter per second per second.
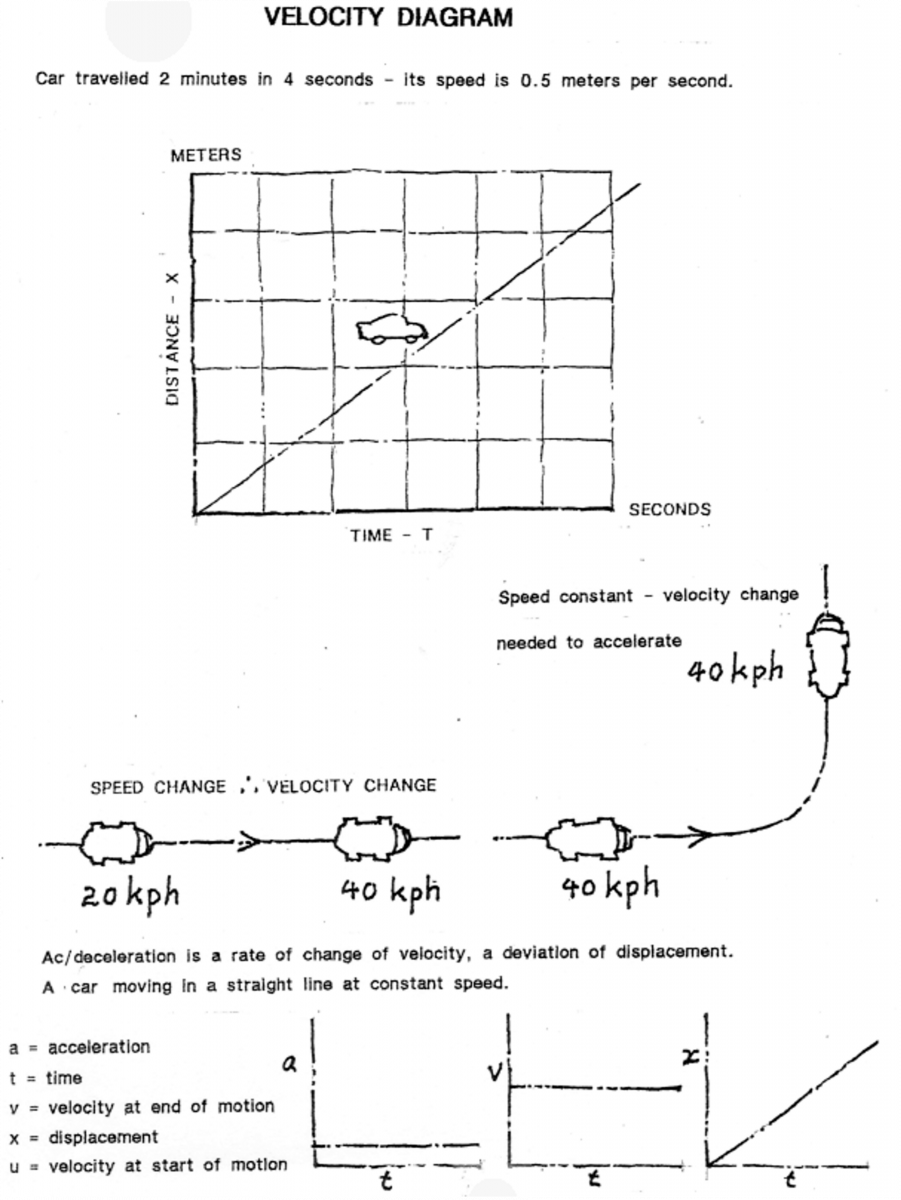
Motion consists of three main areas: 1. Displacement, where a body has come from and where it is going to. 2. Velocity, the time taken to travel the distance. 3. Deceleration, a change in the velocity.
Like displacement, velocity specification requires magnitude (speed) and direction. Velocity is measured as a derived quantity; i.e. distance and time, e.g. KPH.

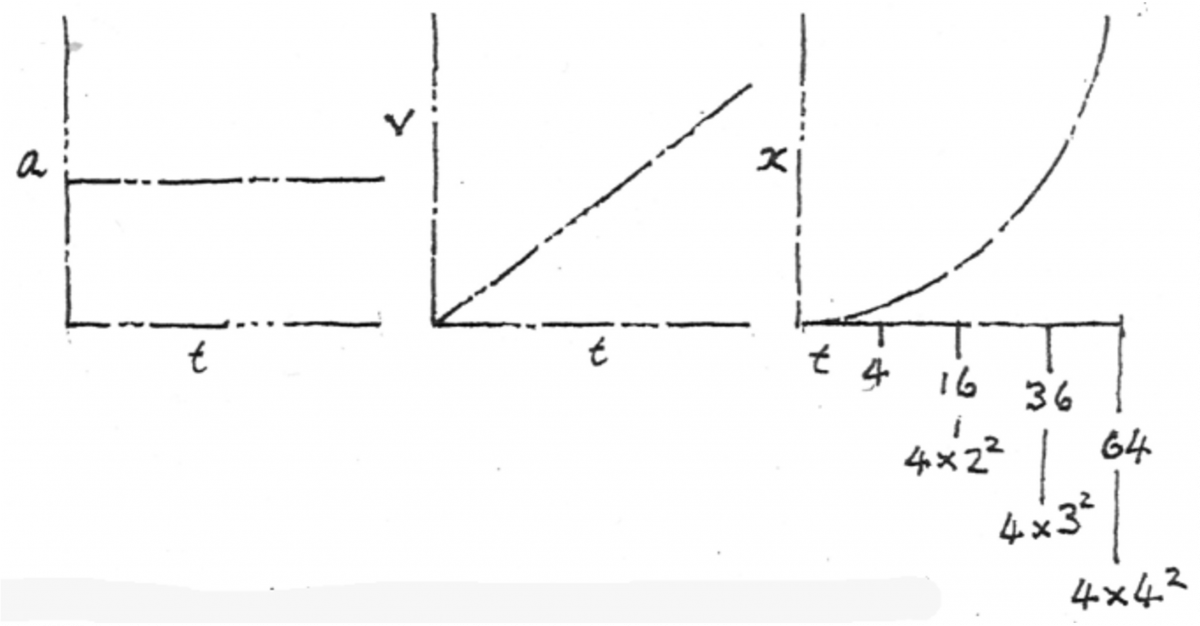
A car traveling in a straight line at constant acceleration…
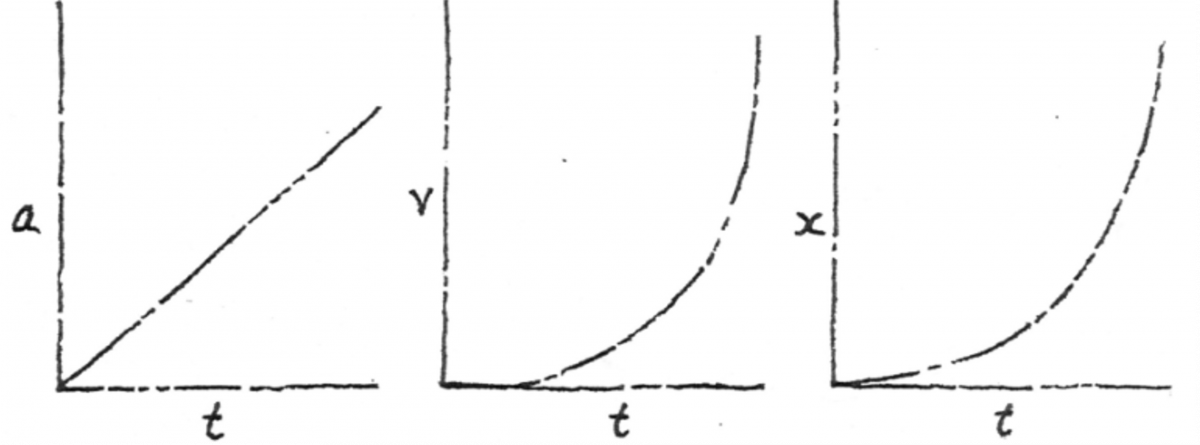
A car traveling in a straight line at steadily increasing acceleration…
4 EQUATIONS OF MOTION
v = u + at
x = ½(u + v)t
v squared = u squared + 2ax
x = ut + 1/2at squared
An example of the first; with a speed of 20mps, and acceleration of 4mpsps; what is speed after 3 seconds?
V = u + at
= 20 + 4 x 3
= 32mps
A body passes A at 20mps, accelerating uniformly to 89m, passes B in 2.5secs; what is acceleration?
X = ut + 1/2at squared
80 = 20 x 2.5 + 0.5 x a2.5 squared
= 50 + 0.5 x a x 2.5 squared
=50 + 3.125xa
A = 9.6mpsps
X = ½(u + v) t states that distance traveled is average speed multiplied by time of travel (Same figures as above (3.secs.)
X = ½(20 + 32)3
= ½ x 52 x 3
= 78 meters
ANGULAR MOTION OR DISPLACEMENT
The calculation of the motion of the circle is the same in principle as that for the straight line = displacement, velocity and acceleration.
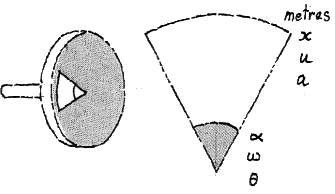
Linear displacement – x meters
Linear velocity – u – (mps)
Linear acceleration a – (mpsps)
Angular acceleration – ![]() – radians psps
– radians psps
Angular velocity – ![]() – radians per second
– radians per second
Angle of displacements in radians – ![]() – radians
– radians
Linear measurements in English alphabet – u, x, a ; Angular in Greek – (omega, theta, alpha).
A radian is a unit of plane angle, the angle between two radii of a circle that cut off on the circumference an arc equal in length to the radius. 1 radian = 57.298°.
Pi over 2 radians = a right angle. The symbol is rad.
For ease of calculation, we simplify a radian to 57.3°.
What is the distance of the wheel traveled – X when radius is 3m and angle 60°?
X = ![]() over 360 x 2
over 360 x 2![]()
= 60 over 360 x 2 x 3.14 x 3
= 0.166 x 18.84
= 3.12m
If Linear Displacement is calculated in revolutions, the following equation is used, revs are shown as N: X = N x rad. Using figures above:
X = 60 over 360 x 57.3
= 3m.
To find Linear Displacement, X = r x ![]()
X = 3 x 60 over 57.3
= 3 x 1.04
= 3.12m
To find Angular Velocity (![]() ): X = r x
): X = r x![]() . For example, if radius is 10m and
. For example, if radius is 10m and ![]() is 60 over 57.3 = 1.04, therefore X = 1.04 = 10.4m
is 60 over 57.3 = 1.04, therefore X = 1.04 = 10.4m
X = ut
10.4 = ut (if it is 5secs)
10.4 – 4 x 5
U = 10.4 over 5
= 2.08mps.
To find Displacement of Body on circle if, for example, linear velocity is 2mps in 5 secs. X = ut, therefore X = 10m
To find Linear Velocity of a body on circle traveling 3m in 10 secs. X = ut
3 = u x 10.
U = 3 over 10
Therefore u = 0.3 secs
To find Angular Velocity of a body on a circle if u is 7mps and r 20m. u = rw
7 = 20 x w. w = 7 over 20.
Therefore w = 0.35rps
To find the angle (in radians) created by a body moving in a circle at 15rps for 10 secs:
= 15 x 10
To find Angular Velocity (![]() ) of a wheel: ut =
) of a wheel: ut = ![]()
To find Linear Velocity (u) of a body moving on a circle: ut – ![]()
To find Linear Acceleration (a) of a body on a circle: a = ![]()
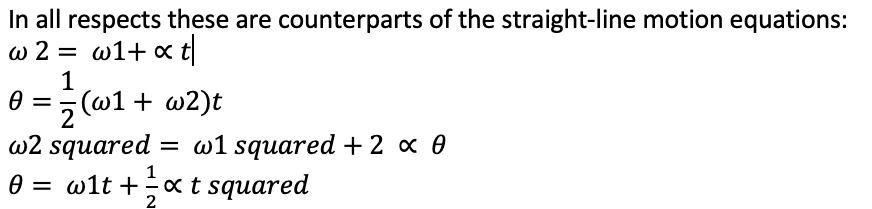
4 EQUATIONS OF ANGULAR MOTION
In all respects these are counterparts of the straight-line motion equations:
CENTRIPETAL ACCELERATION
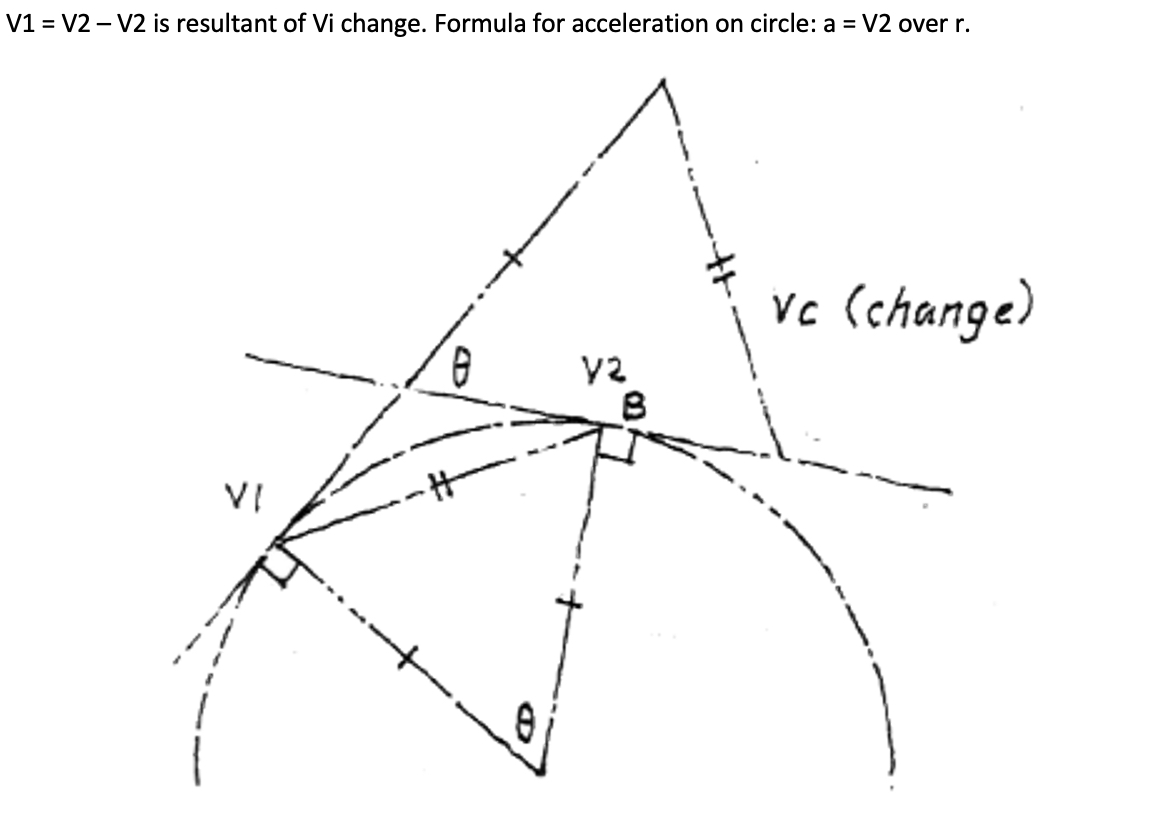
A car traveling round a track of radius 11 meters, at a constant speed of 20 mps; what is average acceleration?
a = V2 over r
= 20 squared over 100
= 400 over 100
= 4 mpsps
THE NATURE OF FORCE
This manifests either through a push (compression) or pull (tension) – the Ahrimanic and Luciferic influences respectively! – action by one object on another. The international unit is the Newton, about 0.1 kilogram. A kilonewton is this X 1000, a meganewton X 1,000,000. 10 kilonewtons are about 1 ton.
STATICS is when the combined forces on an object = 0 – the state of equilibrium, like a bridge. DYNAMICS exist when it is not in equilibrium.
There are three kinds of forces: 1. Real, as in a gas acting on a piston. 2. Remote, when a force acts from a distance, there are only three of these, gravitation, magnetism and electrostatic. 3. Induced, like the upward pressure of water on a ship caused by weight pushing down. Force is represented by the Free Body Diagram, to which all forces are applied.
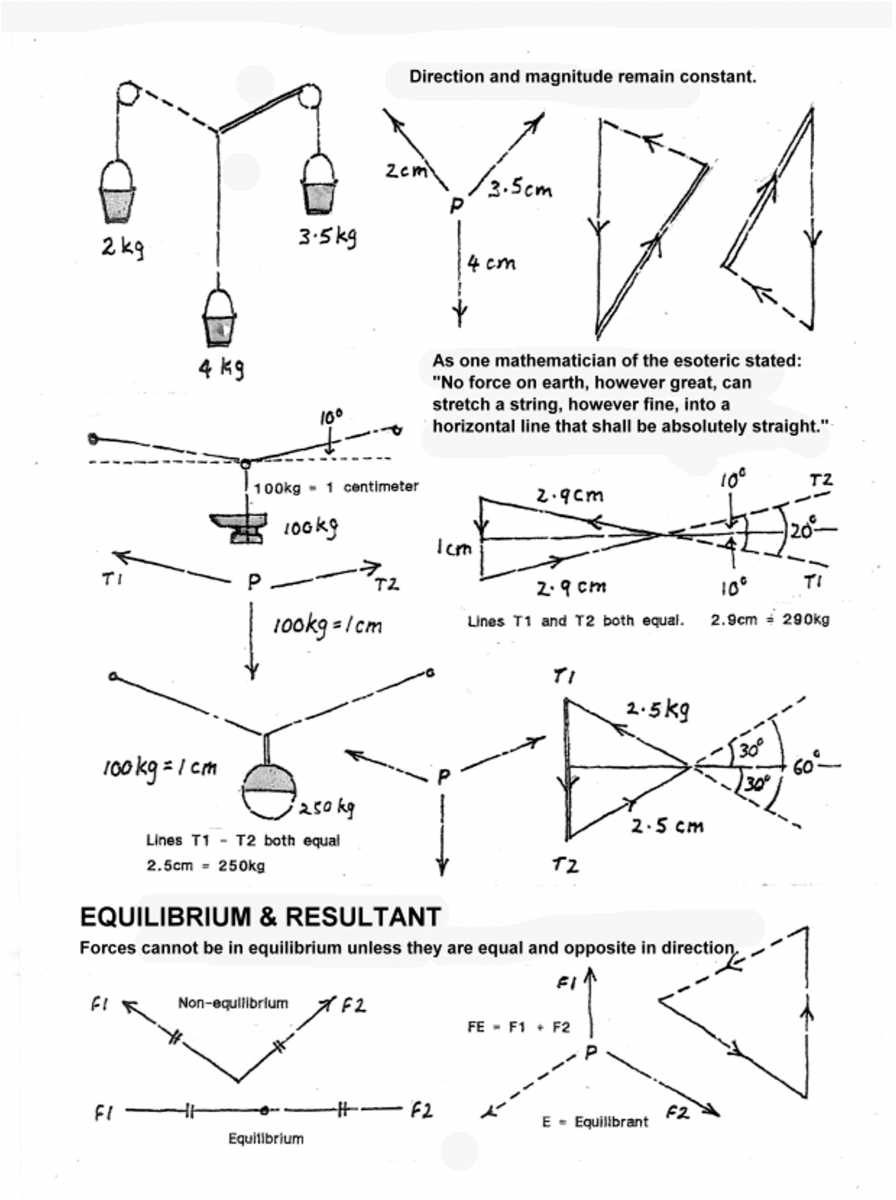
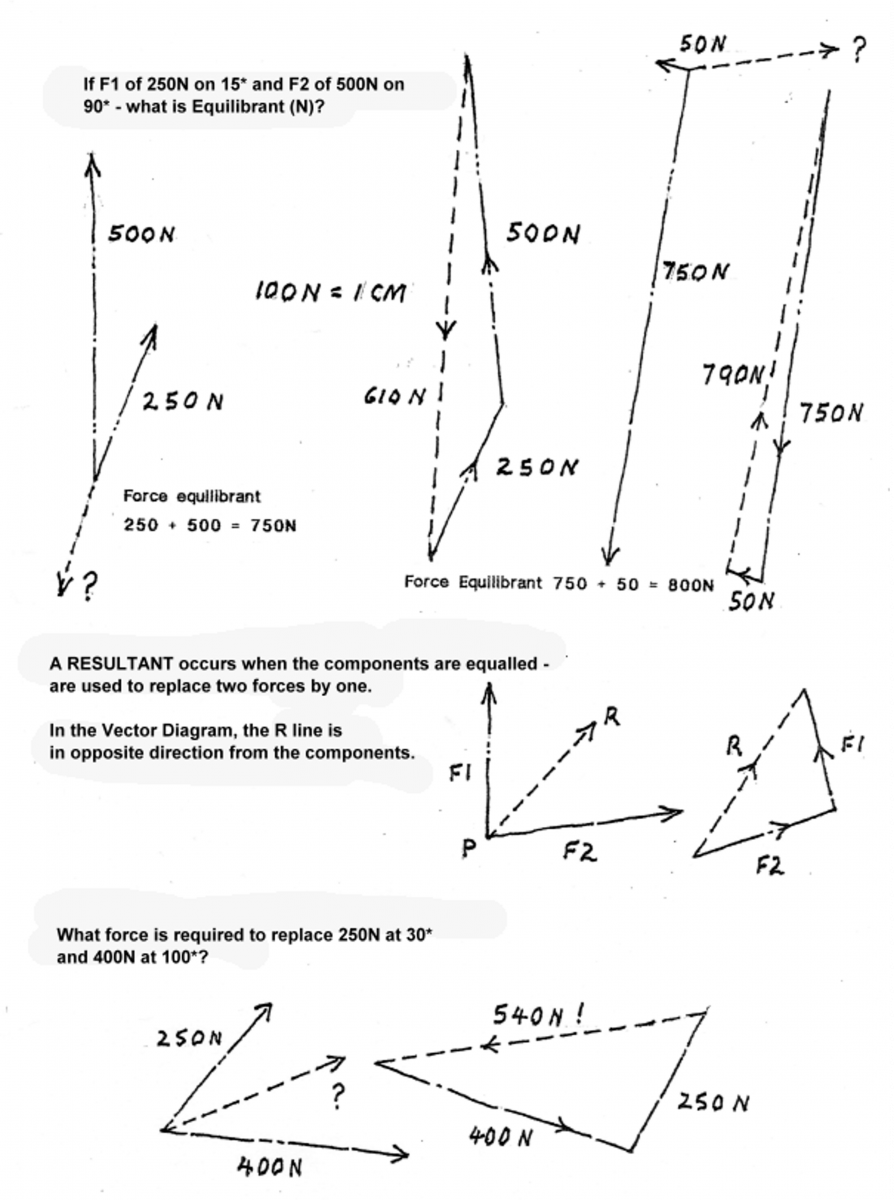
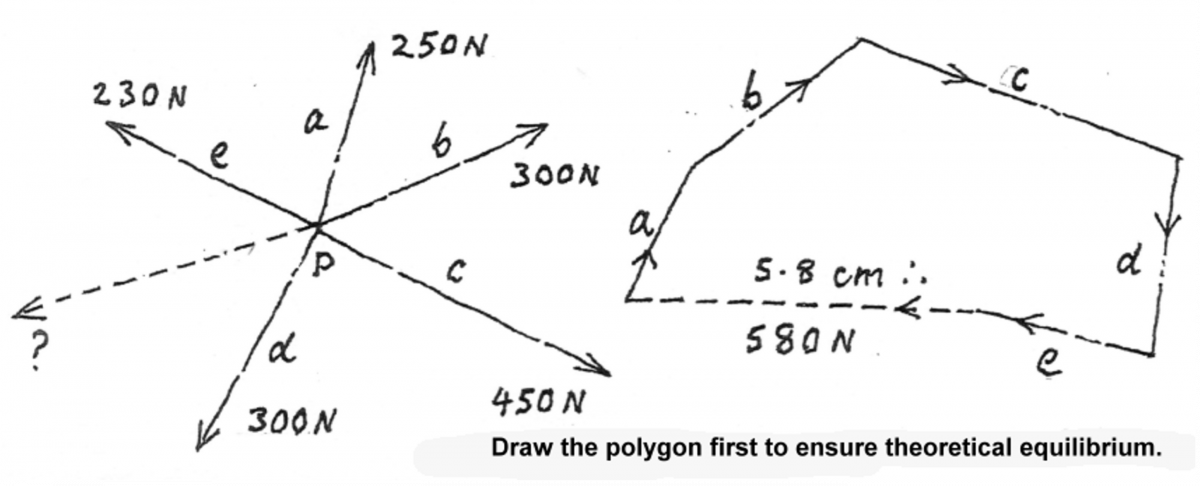
POLYGON OF FORCES
This is used for any number of forces in equilibrium acting at a point – a closed polygon of forces can be drawn… Equilibrant = 58ON

The following is a Vector Diagram for 250N at 30°, 300N at 60°, 450N at 120°, 300N at 220°, 230N at 300°.
Equilibrant = 580N.
Any amount of forces can be replaced by Resultants.
RESOLUTION OF FORCES
This is the reverse of the Resultant, i.e. the replacement of one force by two (or more) others, e.g. R can be replaced by C1 or C2 (component). As we determine the components ourselves, they are always vertical and horizontal, so that we can apply trigonometry.

THE MOVEMENT OF FORCE
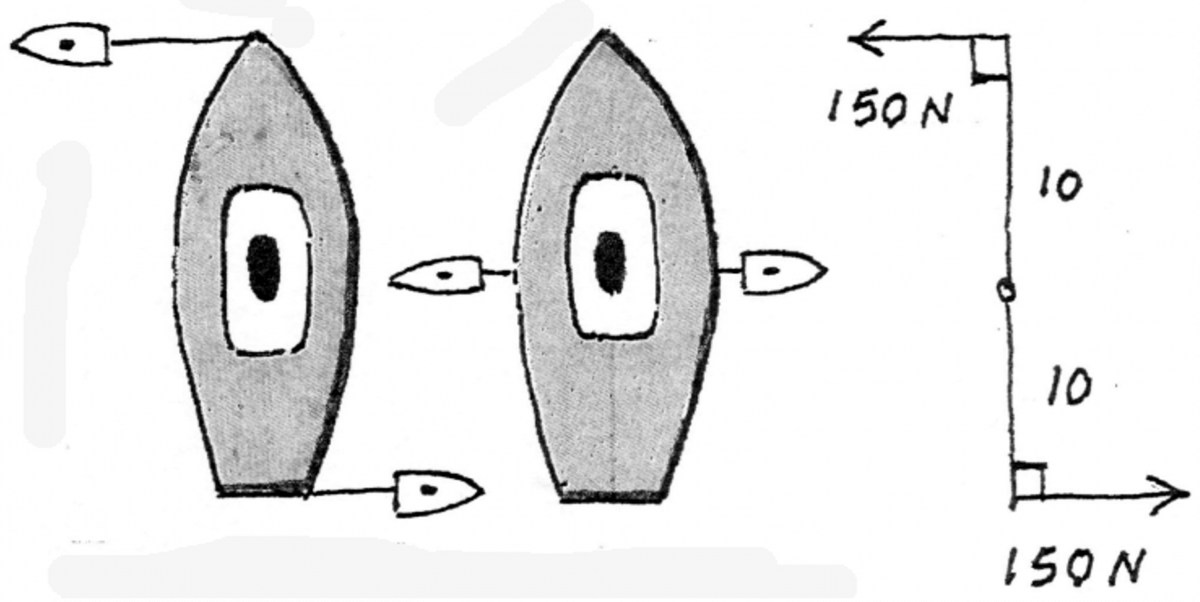
This is its turning effect, and is calculated as the product of its magnitude and the perpendicular distance of its line or action form the turning point. For forces to be in equilibrium, their Moments must total 0.
Moment = Force x perpendicular distance
= 150 x 10 + 150 x 10
= 3000N
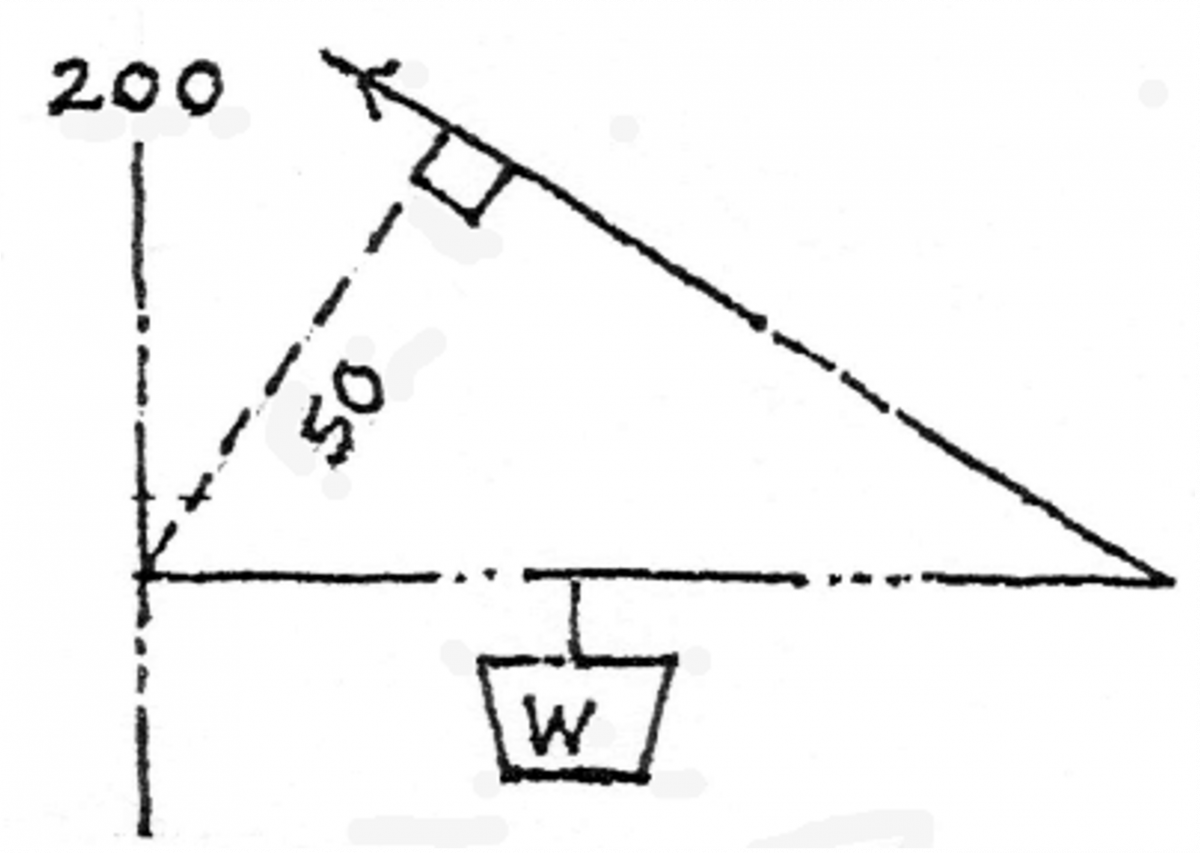
If a force is exerted off the perpendicular, then a right-angle triangle has to be drawn to retrieve the perpendicular.
M = F x PD
= 200 x 50
= 10,000N
When a force is exerted on a point, a Moment can actually take place even when no turning occurs.

As our journey sadly ends, and the sun set over the wonderful world of Maths in Mechanics, we marvel at its radiant colors. Radiant too should be the drawings of the students. It is vital for this nominally dry lesson to embellish it with art and color; not, through necessity, as the foregoing illustrations suggest. Color give soul to the subject. The sampling below, from my daughter’s main lesson book, gives the idea.










Leave a Reply